
Robot d'estampació de 4 eixos per a màquina de premsa



Introducció del producte
Atesa la demanda real de modernització i transformació de la indústria de l'estampació, s'ha dissenyat i desenvolupat un robot de manipulació d'estampació de 4 eixos d'alta flexibilitat i control senzill.
El robot d'estampació de quatre eixos adopta un disseny de quatre eixos, forma compacta, mida petita, pes lleuger, àmpliament utilitzat en soldadura per arc d'argó, paletització, manipulació, estampació i altres camps, pot completar una manipulació estable i una soldadura precisa. El manipulador de punxonament de quatre eixos pot dur a terme l'operació d'estampació de manera flexible en un espai reduït, i és senzill i convenient d'instal·lar i depurar.
Parts principals
Totes les peces de marca xinesa d'alta qualitat
Servomotor
La marca del servomotor és Ruking, una marca xinesa amb els avantatges d'una reacció ràpida, una gran relació parell-inèrcia del parell d'arrencada, etc. Pot suportar condicions de funcionament dures que realitzen operacions d'acceleració i desacceleració endavant i endarrere molt freqüents i pot suportar diverses vegades la sobrecàrrega en poc temps.
SISTEMA DE CONTROL LNC
El robot Yooheart adopta la programació d'ensenyament. És senzill, convenient i flexible en funcionament. El robot Yooheart també admet la programació remota, que es pot aplicar en una varietat de programes complexos.
COS DE ROBOT
El cos adopta el procés de fosa a pressió, utilitzant la cavitat del motlle per aplicar una alta pressió a la formació de metall fos, formant el cos d'alta densitat, forta rigidesa, el seu propi pes és més lleuger.
Mostra de detalls
Alta precisió
Resposta d'acció ràpida
I el nivell és líder
al país
Estructura senzilla
Fàcil de mantenir
Més rendible
Alta velocitat i estabilitat
Camí precís
Solucions d'estampació perfectes
Paràmetre del robot
| Projecte | Especificació | Projecte | Especificació | Eix | Rang de moviment | Velocitat màxima | Dia buit |
| Eix | 4 | Temperatura | 0 ℃-45 ℃ | J1 | ±170º | 190º/s | —— |
| Capacitat | 3,7 KVA | Humitat | 20-80% HR (sense humitat) | J2 | +10º~+125º | 120º/s | —— |
| Pes | 170 kg | Vibració | Menys de 4,9 M/S² | J3 | +10º~-95º | 120º/s | —— |
| Càrrega útil màxima | 10 kg | Altres | Sense gasos ni líquids inflamables i corrosius, mantenir allunyat de fonts de soroll elèctric | J4 | ±360º | 200º/s | —— |
| Rang màxim de treball | 140 cm | Repetibilitat | ±0,08 mm | Nivell IP | IP65 | Instal·lació | Terra |
Aplicació de robots
Càrrega i descàrrega de productes d'extrusió en calent
Aquest projecte es centra principalment en la conformació d'estampats de coure. El procés de punxonament vermell és un procés d'extrusió en calent. Durant el punxonament vermell, el material metàl·lic s'escalfa a una temperatura determinada i es col·loca en un motlle preescalfat. Després del moviment alternatiu únic de la màquina-eina a pressió, el material metàl·lic es deforma plàsticament per obtenir la mida, la forma i les bones propietats mecàniques necessàries de les peces d'estampació. El client adopta el robot de manipulació de 4 eixos Yooheart per carregar i descarregar la peça metàl·lica punxonada vermella.
Visió general de la solució d'integració
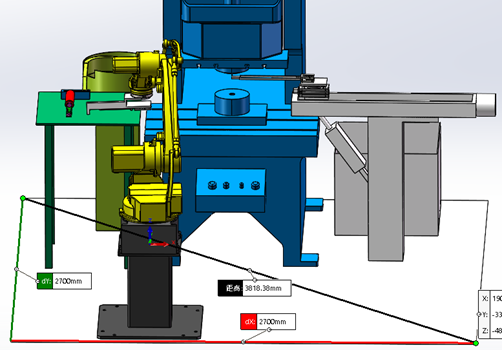
El projecte consisteix en una premsa punxonadora, un robot Yunhua de 4 eixos i 10 kg, eines de posicionament secundari, un dispositiu de cistellatge combinat de cilindres, etc. Les dades conegudes, com ara el temps de tancament, la càrrega nominal i les condicions de treball, es troben totes dins del rang de paràmetres nominals de HY1010B-140.


Visió general del procés de producció
Alimentació manual per a polipast▶ alimentació de placa vibratòria▶ Posicionament del dispositiu d'alimentació abans de l'escalfament▶ escalfament de tubs per corrents de Foucault▶ posicionament del dispositiu de posicionament secundari▶ subjecció del robot▶ premsat de punxonadora▶ descàrrega del dispositiu d'alimentació de cilindres
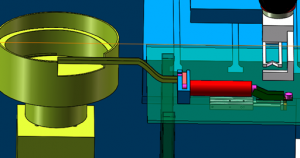
Resum de l'acció del dispositiu d'alimentació i posicionament
Alimentar la placa vibrant manualment ▶ La placa vibrant és el subministrament de material per al tub de calefacció per corrents de Foucault ▶ L'eina de posicionament secundària és el posicionament de la pinça del robot
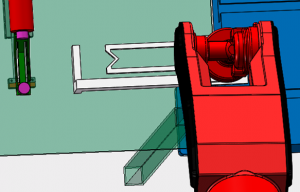
Visió general de l'acció del dispositiu de subjecció
El robot subjectarà el material de coure posicionat ▶ per a la formació de punxons
Servei postvenda
Tenim un servei postvenda perfecte per ajudar-vos a aprendre el funcionament, fins i tot si mai no heu utilitzat robots industrials i resoldre problemes durant el vostre temps d'ús.
Primer, us proporcionarem els manuals relacionats per ajudar-vos a entendre alguna informació sobre els robots.
En segon lloc, proporcionarem una sèrie de vídeos didàctics. Podeu seguir aquests vídeos pas a pas, des del cablejat i la programació senzilla fins a la realització de programes complexos. És la manera més eficient d'ajudar-vos en les circumstàncies de la covid.
Finalment, però no menys important, oferirem servei en línia amb més de 20 tècnics. Si teniu cap pregunta, podeu contactar amb nosaltres en qualsevol moment i us ajudarem ràpidament.


Sol·licitud de cotització
P. Això és segur per als treballadors?
A. Sí, un dels avantatges d'utilitzar robots per a la recollida i col·locació és protegir els treballadors de lesions. Un treballador pot manejar de 5 a 6 unitats de màquina CNC.
P. Quin tipus de producte pot utilitzar un robot de càrrega i descàrrega?
A. Cada carregador de màquines robòtiques pot estar equipat amb eines de punta de braç adequades que siguin compatibles amb la vostra màquina i producte. Són extremadament precisos i també tenen la destresa per manipular la peça amb cura.
P. Només es pot utilitzar un extrem de les eines del braç per carregar i descarregar el robot?
A. El braç robòtic industrial pot modificar el programa i la pinça de la pinça, canvis ràpids en l'emmagatzematge intel·ligent, velocitat de depuració, eliminant la necessitat d'empleats però també del temps de formació, es pot posar ràpidament en producció.
P. Hi ha algun altre avantatge de carregar i descarregar robots?
A. Millorar la qualitat de l'aspecte de la peça: línies de producció automatitzades amb robots, des de l'alimentació, la subjecció i el tall completament per robots, fins a la reducció dels enllaços intermedis, la qualitat de la peça millora considerablement, especialment amb una superfície més bonica.
P. Podeu subministrar solucions completes per a la càrrega i descàrrega de robots?
A. Sí, ho podem fer juntament amb el nostre distribuïdor.
Categories de productes
-

YH1006A-175: Robot de soldadura de 6 eixos per a alta precisió...
-
Robot de soldadura Mig de 6 eixos per a prestatgeria d'emmagatzematge
-

Estació de treball de soldadura per arc robòtica de 7 eixos
-

Paletitzador robòtic de 6 DOF i 165 kg de càrrega útil
-
Robot de soldadura TIG amb alimentador de filferro
-

Robot de soldadura per arc de peces d'automòbils



